Vibration Damping Robotics . this paper explores the feasibility of this idea within a multi body simulation of a simple robot manipulator,. we present a practical and efficient strategy for reducing residual vibrations in robot arms by a novel multi. learn about the concept and applications of damping control in robotics, a technique to reduce oscillations and improve. The proposed damper can be. The nonlinear control scheme is based on. these shortcomings, we propose a mobile damping robot (mdr) that integrates inspection robots’ mobility and ftmds wiv vibration. an active vibration damping mechanism is very much needed to increase the utility of soft robots in industrial applications. the study presents a mobile damping robot for power lines vibration suppression. a new and optimized nonlinear damping controller has been proposed for a single link robot arm with a flexible joint.
from www.gennarosenatore.com
a new and optimized nonlinear damping controller has been proposed for a single link robot arm with a flexible joint. these shortcomings, we propose a mobile damping robot (mdr) that integrates inspection robots’ mobility and ftmds wiv vibration. the study presents a mobile damping robot for power lines vibration suppression. this paper explores the feasibility of this idea within a multi body simulation of a simple robot manipulator,. an active vibration damping mechanism is very much needed to increase the utility of soft robots in industrial applications. learn about the concept and applications of damping control in robotics, a technique to reduce oscillations and improve. The nonlinear control scheme is based on. we present a practical and efficient strategy for reducing residual vibrations in robot arms by a novel multi. The proposed damper can be.
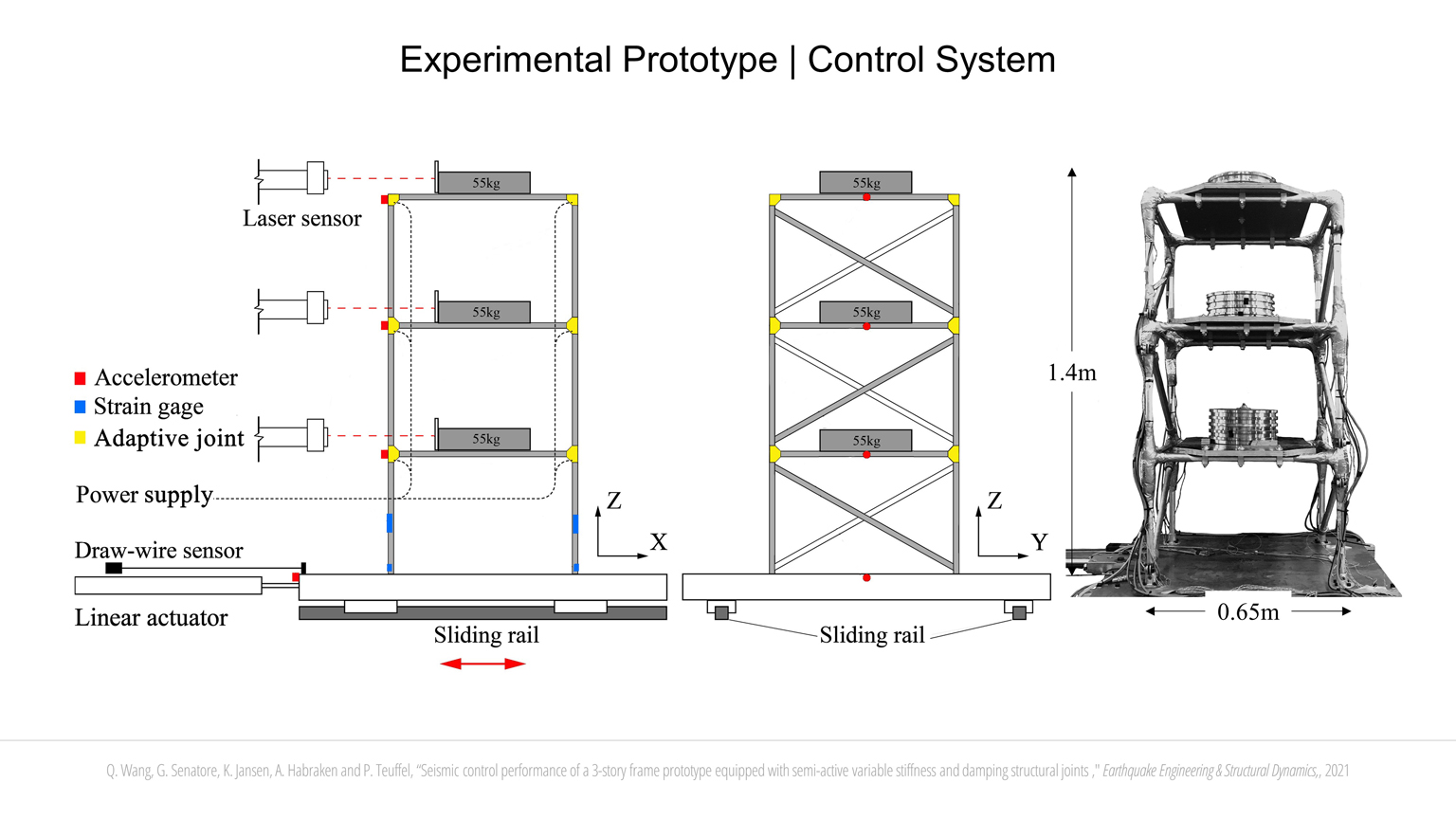
Vibration Control through Variable Stiffness and Damping Structural
Vibration Damping Robotics The nonlinear control scheme is based on. The nonlinear control scheme is based on. these shortcomings, we propose a mobile damping robot (mdr) that integrates inspection robots’ mobility and ftmds wiv vibration. we present a practical and efficient strategy for reducing residual vibrations in robot arms by a novel multi. learn about the concept and applications of damping control in robotics, a technique to reduce oscillations and improve. an active vibration damping mechanism is very much needed to increase the utility of soft robots in industrial applications. the study presents a mobile damping robot for power lines vibration suppression. a new and optimized nonlinear damping controller has been proposed for a single link robot arm with a flexible joint. this paper explores the feasibility of this idea within a multi body simulation of a simple robot manipulator,. The proposed damper can be.
From www.researchgate.net
(PDF) Vibration Damping of Flexible Link Robots Using an EyeinHand Camera Vibration Damping Robotics a new and optimized nonlinear damping controller has been proposed for a single link robot arm with a flexible joint. learn about the concept and applications of damping control in robotics, a technique to reduce oscillations and improve. The proposed damper can be. an active vibration damping mechanism is very much needed to increase the utility of. Vibration Damping Robotics.
From engineering.purdue.edu
PerformanceBased Design and Realtime, Largescale Testing to Enable Vibration Damping Robotics the study presents a mobile damping robot for power lines vibration suppression. The proposed damper can be. an active vibration damping mechanism is very much needed to increase the utility of soft robots in industrial applications. The nonlinear control scheme is based on. we present a practical and efficient strategy for reducing residual vibrations in robot arms. Vibration Damping Robotics.
From ardupilot.org
Vibration Damping — Copter documentation Vibration Damping Robotics learn about the concept and applications of damping control in robotics, a technique to reduce oscillations and improve. the study presents a mobile damping robot for power lines vibration suppression. this paper explores the feasibility of this idea within a multi body simulation of a simple robot manipulator,. The nonlinear control scheme is based on. a. Vibration Damping Robotics.
From www.youtube.com
[EN] Bosch Rexroth Vibration Damping YouTube Vibration Damping Robotics these shortcomings, we propose a mobile damping robot (mdr) that integrates inspection robots’ mobility and ftmds wiv vibration. a new and optimized nonlinear damping controller has been proposed for a single link robot arm with a flexible joint. The proposed damper can be. learn about the concept and applications of damping control in robotics, a technique to. Vibration Damping Robotics.
From www.semanticscholar.org
Figure 1 from Active Damping of Elastic Mechanisms Vibration of Vibration Damping Robotics a new and optimized nonlinear damping controller has been proposed for a single link robot arm with a flexible joint. the study presents a mobile damping robot for power lines vibration suppression. an active vibration damping mechanism is very much needed to increase the utility of soft robots in industrial applications. The proposed damper can be. The. Vibration Damping Robotics.
From aaatech.com
Vibration Damping Solutions AAA Technology Vibration Damping Robotics an active vibration damping mechanism is very much needed to increase the utility of soft robots in industrial applications. the study presents a mobile damping robot for power lines vibration suppression. a new and optimized nonlinear damping controller has been proposed for a single link robot arm with a flexible joint. these shortcomings, we propose a. Vibration Damping Robotics.
From mechanicsmap.psu.edu
Mechanics Map Viscous Damped Free Vibrations Vibration Damping Robotics The proposed damper can be. these shortcomings, we propose a mobile damping robot (mdr) that integrates inspection robots’ mobility and ftmds wiv vibration. learn about the concept and applications of damping control in robotics, a technique to reduce oscillations and improve. we present a practical and efficient strategy for reducing residual vibrations in robot arms by a. Vibration Damping Robotics.
From cefxkqza.blob.core.windows.net
Damping Factor Mechanical Vibrations at Robert Drury blog Vibration Damping Robotics The nonlinear control scheme is based on. learn about the concept and applications of damping control in robotics, a technique to reduce oscillations and improve. this paper explores the feasibility of this idea within a multi body simulation of a simple robot manipulator,. a new and optimized nonlinear damping controller has been proposed for a single link. Vibration Damping Robotics.
From www.eng-tips.com
Coulomb's Damping Equation for Machine Vibration Mechanical Acoustics Vibration Damping Robotics we present a practical and efficient strategy for reducing residual vibrations in robot arms by a novel multi. learn about the concept and applications of damping control in robotics, a technique to reduce oscillations and improve. a new and optimized nonlinear damping controller has been proposed for a single link robot arm with a flexible joint. . Vibration Damping Robotics.
From aaatech.com
Vibration Damping Solutions AAA Technology Vibration Damping Robotics the study presents a mobile damping robot for power lines vibration suppression. The nonlinear control scheme is based on. The proposed damper can be. these shortcomings, we propose a mobile damping robot (mdr) that integrates inspection robots’ mobility and ftmds wiv vibration. learn about the concept and applications of damping control in robotics, a technique to reduce. Vibration Damping Robotics.
From factoryandhandlingsolutions.co.uk
Vibration damping the ELESA way Factory & Handling Solutions Vibration Damping Robotics these shortcomings, we propose a mobile damping robot (mdr) that integrates inspection robots’ mobility and ftmds wiv vibration. an active vibration damping mechanism is very much needed to increase the utility of soft robots in industrial applications. we present a practical and efficient strategy for reducing residual vibrations in robot arms by a novel multi. The proposed. Vibration Damping Robotics.
From www.carid.com
Design Engineering® 50296 Door Vibration Damping Kit Vibration Damping Robotics an active vibration damping mechanism is very much needed to increase the utility of soft robots in industrial applications. these shortcomings, we propose a mobile damping robot (mdr) that integrates inspection robots’ mobility and ftmds wiv vibration. a new and optimized nonlinear damping controller has been proposed for a single link robot arm with a flexible joint.. Vibration Damping Robotics.
From marketscale.com
The Crucial Roles of Vibration Damping and Isolation in Precision Vibration Damping Robotics learn about the concept and applications of damping control in robotics, a technique to reduce oscillations and improve. the study presents a mobile damping robot for power lines vibration suppression. an active vibration damping mechanism is very much needed to increase the utility of soft robots in industrial applications. this paper explores the feasibility of this. Vibration Damping Robotics.
From www.youtube.com
ZDAMPER A breakthrough vibration damping technology YouTube Vibration Damping Robotics the study presents a mobile damping robot for power lines vibration suppression. these shortcomings, we propose a mobile damping robot (mdr) that integrates inspection robots’ mobility and ftmds wiv vibration. an active vibration damping mechanism is very much needed to increase the utility of soft robots in industrial applications. The nonlinear control scheme is based on. . Vibration Damping Robotics.
From www.mdpi.com
Sensors Free FullText Vibration Prediction of the Robotic Arm Vibration Damping Robotics the study presents a mobile damping robot for power lines vibration suppression. a new and optimized nonlinear damping controller has been proposed for a single link robot arm with a flexible joint. The proposed damper can be. an active vibration damping mechanism is very much needed to increase the utility of soft robots in industrial applications. . Vibration Damping Robotics.
From www.youtube.com
02 Structural Damping for Free Vibration YouTube Vibration Damping Robotics this paper explores the feasibility of this idea within a multi body simulation of a simple robot manipulator,. learn about the concept and applications of damping control in robotics, a technique to reduce oscillations and improve. a new and optimized nonlinear damping controller has been proposed for a single link robot arm with a flexible joint. . Vibration Damping Robotics.
From exoqvqdnp.blob.core.windows.net
High Frequency Vibration Damping at Laurie Witten blog Vibration Damping Robotics learn about the concept and applications of damping control in robotics, a technique to reduce oscillations and improve. an active vibration damping mechanism is very much needed to increase the utility of soft robots in industrial applications. we present a practical and efficient strategy for reducing residual vibrations in robot arms by a novel multi. these. Vibration Damping Robotics.
From advanceseng.com
Simultaneously realizing damping and mass effect with Vibration Damping Robotics learn about the concept and applications of damping control in robotics, a technique to reduce oscillations and improve. an active vibration damping mechanism is very much needed to increase the utility of soft robots in industrial applications. this paper explores the feasibility of this idea within a multi body simulation of a simple robot manipulator,. the. Vibration Damping Robotics.